IMU,為 Inertial Measurement Unit的縮寫,也就是慣性測量單元。
定義: IMU,通常包含加速度計、陀螺儀和磁力儀三種傳感器。使用IMU可以測量速度、方向和重力,這種動捕技術也就是我們常說的慣性動捕。
--------------------------------------------------------------------------------------------------------------------
引申閱讀:
陀螺儀
陀螺儀的測量原理有簡單點來說就是角動量守恒,需要理解的可以觀看以下視頻
https://www.youtube.com/watch?v=ty9QSiVC2g0
https://www.youtube.com/watch?v=XPUuF_dECVI
但是在這里,我們只需要知道這樣一件事情
陀螺儀能測量出X,Y ,Z三軸的角速度
加速度計
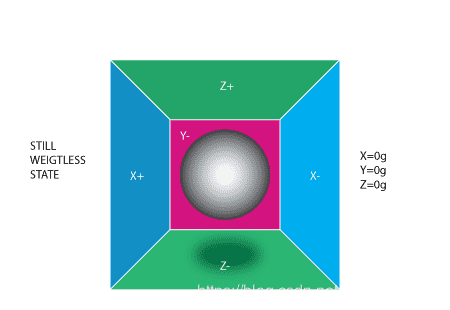
加速度計在網絡上有一個通俗易懂的盒子模型。我們假設在失重環境下有一個球放在一個一樣大的方盒子里面,如圖。
這時如果有一個加速度向左,如圖
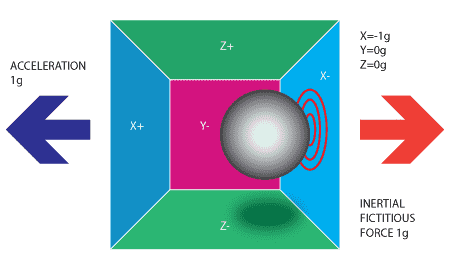
則盒子右側便能檢測到一個力。如果在地球上則有一個重力加速度如圖
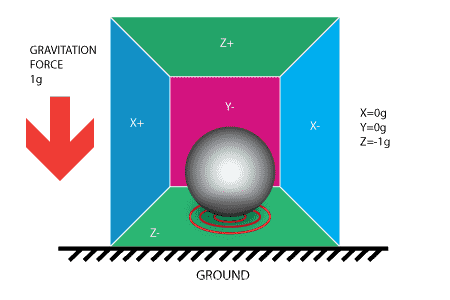
這時我們根據重力加速度在各個方向上的分量便能求解出物體的姿態了,但是水平方向偏航角與重力加速度垂直無法求得,具體如何求解可參考
http://www.starlino.com/imu_guide.html
這里同樣只需要知道以下兩點
加速度計能測量出三軸的加速度
加速度計無法求出水平方向的偏航角
磁力計
簡單來說磁力計就是一個指南針,正好彌補了加速度計無法測量的水平方向的偏航角的問題。具體的原理介紹網絡上有大量文章,解算姿態也請參考這篇文章。
https://blog.csdn.net/loveuav/article/details/81713015
值得注意的是磁力計解算姿態時不能直接采用公式
anglez=?arctan2(mny,mnx)
而是需要使用加速度計計算出的roll和pitch做一個坐標變換,再帶入計算。
引申閱讀來源:https://blog.csdn.net/RoboChengzi/java/article/details/87720255














