近年來,在Oculus Quest系列一體機的推動下,VR以更加“平易近人”的姿態切入C端游戲市場,同時也讓更多VR玩家體驗到用手勢來交互的方式。Quest和Quest 2利用頭顯配備的4顆光學攝像頭和算法來識別手勢,優勢是低成本、性能足夠穩定、容易上手。
盡管如此,基于傳感器的手勢追蹤手套在準確性和靈敏性依然比光學識別方案更優秀,目前市面上已有包括BeBop、Manus等多種手勢手套方案,此前Facebook Reality Labs也曾展示過一項基于光線追蹤原理的手勢追蹤手套,看起來精準性比無手套方案更好,可以用于模擬鍵盤打字。
當然,現有方案幾乎很少用于C端,因為成本較高、體積外形較笨重,所以應用場景以B端為主。
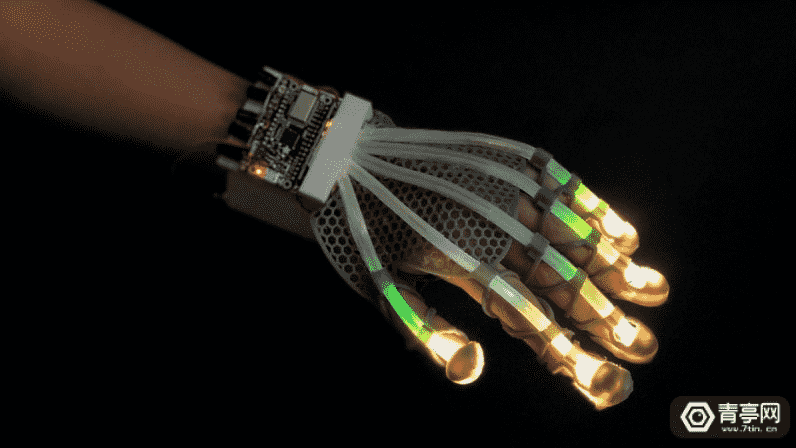
近期,康奈爾大學科研人員研發了一種柔性手勢識別手套,特點是成本足夠低,而且不僅可以識別手勢,還能識別手指動作的力度、彎曲度和拉力,也就是說可以實現更加精準的手勢模擬。
據青亭網了解,該手套方案由康奈爾大學工程學、院副教授Rob Shepherd帶領的科研團隊研發,原理是結合光導纖維傳感器、低成本LED和吸光染料來追蹤3D的手勢變化。利用上述材料開發的手套體積足夠小、材質足夠靈活柔軟,同時制作工藝較簡單、可集成開發為設計輕便的手套產品。目前,科研人員計劃將該方案于明年商業化,應用于運動醫學、物理治療、AR/VR等場景。
那么這款手勢識別手套方案具體是怎樣操作的?和其他方案有何不同?接下來就一起來了解一下。
據悉,Shepherd此前負責的有機機器人實驗室曾研發出多種柔性傳感器技術,其中一項的原理利用光電二極管識別光束通過光波導材質時強度的變化,來判斷光波導材料的變形程度。科研人員將這項技術用于提升柔性機器人的感知,還將方案中的傳感器與硅基材質結合,用于識別濕度、溫度和拉力。
不過,硅纖維材質并不兼容可延展的柔性電子元件,而且由于柔性材質變形的規律復雜,可能同時融合多種模式的變形,因此康奈爾科研人員研發了一種能夠分離不同變形模式的傳感器。
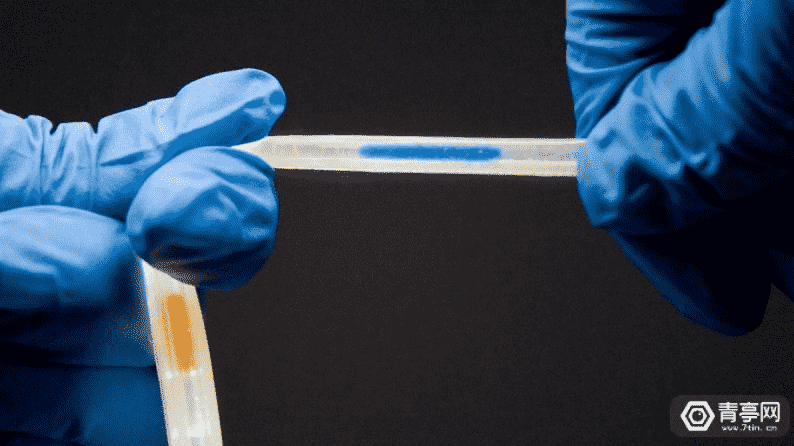
具體來講,科研人員研發了一種支持多模式傳感的柔性光導方案(SLIMS),即:一個包含雙彈性聚氨酯內核的長管,其中一個內核保持透明,另一個內核的不同位置注入吸光染料,并與LED燈相連。同時,與雙內核集成的RGB傳感器芯片用于記錄光束通過產生的幾何變化。
通過觀察光束通過染料,這種雙內核方案提升了傳感器可識別到的變形數據(包括壓力、彎曲、延長等)。也就是說,被LED燈照亮的吸光染料可作為一種可追蹤的空間編碼。接著,科研人員開發了一種可通過識別到的數據區分不同變形動作的數學模型,來推斷手指的確切位置,以及彎曲的力度。
除此之外,相比于此前的分布式光導纖維傳感器,SLIMS傳感器可搭配分辨率較小的小型光電元件運行,從而降低成本、更容易制造、體積更小。
應用場景方面,該方案與柔性機器手集成后,可識別抓取物體時產生的滑動。另外,也可以集成于穿戴式AR/VR手套,科研人員利用3D打印技術只做了一款基于SLIMS傳感器的原型手套,采用集成式一體設計,配備鋰電池和藍牙模塊,可無線控制一些基礎軟件。據稱,手套識別手勢的速度幾乎實時。
總之,作為一款低成本手勢識別方案,康奈爾大學的手套原型可以做到市面上一些視覺手勢方案不具備的效果,比如識別觸覺交互、力度等等。
Shepherd表示:目前,手勢識別技術以視覺方案為主,但大多數幾乎不會去識別觸覺,而我們研發的手套方案同樣基于RGB光學原理,不止能識別手勢,還能識別觸覺反饋。
未來,這項技術有望應用于物理治療、運動醫學、AR/VR領域。尤其是在AR/VR應用場景,它可以識別手與虛擬物體的觸覺和力反饋,模擬更逼真的物理交互。舉個例子,在AR修車或換輪胎培訓中,準確模擬動作力度和物理效果相當重要,這樣學員才能在虛擬環境中感受擰螺母所需的力度,增強肌肉記憶。
來源:青亭網














