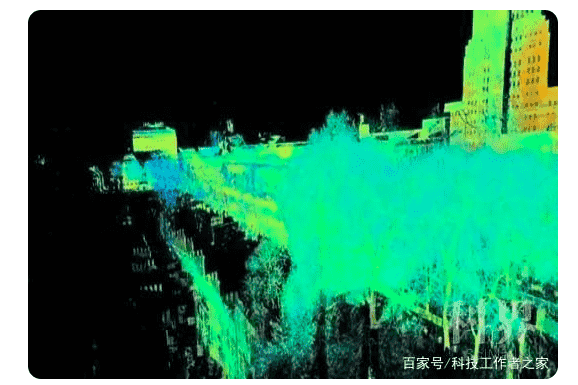
根據激光雷達數據構建的倫敦市中心Malet街道的3D模型。
eurekalert.org網站當地時間4月25日報道,英國劍橋大學、牛津大學和倫敦大學學院的研究人員開發了首款基于激光雷達的車用增強現實(AR)平視顯示器。原型機測試結果表明,與大多數平視顯示器使用的2D擋風玻璃投影不同,使用激光雷達數據創建的超高清全息路況信息可直接傳送到駕駛員眼中,在不分散其注意力的前提下提示潛在危險因素,進而保障道路安全。當路標等物體被大樹或大卡車遮擋時,新技術尤為有效。相關論文發表在《光學快報》雜志中。論文作者、劍橋大學博士研究生Jana Skirnewskaja說:“在互聯車輛中,平視顯示器能夠將速度或燃油信息直接投射到駕駛員前方的擋風玻璃上,但駕駛員必須聚精會神地盯著道路。因此,我們希望更進一步,將真實物體呈現為全景3D投影。”
Skirnewskaja等人使用遙感方法,發送激光脈沖測量了掃描儀和物體之間的距離,并借助激光雷達掃描了倫敦市中心、倫敦大學學院校園里繁忙的Malet街。論文作者、地理學家Phil Wilkes等人從Malet街的不同位置發出數以百萬計的脈沖,然后將激光雷達數據與點云數據相結合,建立了3D模型。Wilkes說:“通過這種方式,我們將掃描結果拼合在一起,搭建起一個完整場景。我們不僅可以捕捉樹木,還能夠捕捉汽車、卡車和路標,以及典型城市街道上能看到的其他物體。雖然采集的數據來自一個固定平臺,但它與下一代半自動/自動車輛的傳感器非常相似。”
當Malet街的3D建模完成后,研究人員將街道上的各種物體轉化成了全息投影。激光雷達數據以點云數據的形式出現,分離算法對目標對象進行識別提取,另一種算法則將目標物體轉換成計算機生成的衍射圖案。最后,數據點被載入光學設備中,以便向駕駛員視野投射3D全息影像。
在先進算法的協助下,光學裝置可投射多層全息圖。全息投影能以不同尺寸顯示,并與真實物體的實際位置對齊。在未來,研究人員希望通過個性化設置來完善全息投影系統,并開發出能投射不同物體的多層算法——駕駛員自由安排分層全息圖在視覺空間中的位置。例如,在第一層中,距離較遠的交通標志以較小尺寸投影;在第二層中,距離較近的警示牌以較大尺寸顯示。
Skirnewskaja說:“分層顯示技術提供了增強顯示體驗,并以一種自然的方式警醒著駕駛員,不會分散他的注意力。每個人可能對顯示選項有不同的偏好——有的駕駛員可能希望將健康信息投影在平視顯示器的某個區域。全景全系投影能夠實時顯示道路物體,對現有安全措施而言是極具價值的補充。”
來源:科技工作者之家














